Ერგონომიური დიზაინი და ინტუიციური ექსპლუატაცია
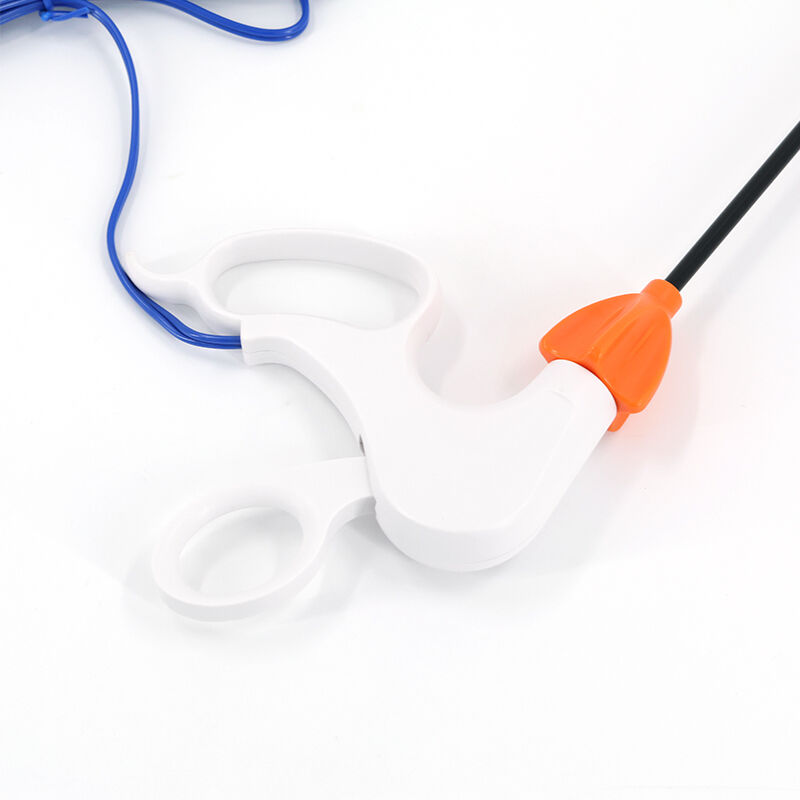
Თანამედროვე ენდოსკოპური ბიპოლარული ფორცეფსების ერგონომიული დიზაინის ფილოსოფია აყენებს ქირურგის კომფორტსა და ოპერაციულ ეფექტურობას პრიორიტეტად, რადგან გრძელდებარე საქირურგიო პროცედურები მოითხოვს ინსტრუმენტებს, რომლებიც მინიმუმამდე ამცირებენ ხელის დაღლილობას და მაქსიმუმამდე ამაღლებენ მართვის სიზუსტეს. საჭიროების შესაბამად შემუშავებული ხელის გეომეტრია ანაწილებს ხელის მიერ აღებულ წნევას თანაბრად ხელის მთლიან ზედაპირზე, რაც ამცირებს თითების სახსრებსა და ხელის კუნთებზე მოქმედებას გრძელდებარე პროცედურების დროს. აქტივაციის მეхანიზმი შეიცავს გლუვ, პროგრესიულ ტრიგერს, რომელიც აძლევს ტაქტილურ სიგნალს და საშუალებას აძლევს ქირურგებს მოხერხებულად მოაწესრიგონ ენერგიის მიწოდება მცირე თითის მოძრაობებით, ხოლო არ მოითხოვს ძალიან ძლიერ ხელის მიერ აღებას. ეს ინტუიციური დიზაინი საშუალებას აძლევს ქირურგებს შეინარჩუნონ ხელის სტაბილური პოზიცია და ერთდროულად შეასრულონ მიკრო-რეგულირების მოქმედებები ენერგიის მიწოდებაზე, რაც იწვევს უფრო კონტროლირებად ქსოვილის ეფექტებს და გაუმჯობესებულ საქირურგიო შედეგებს. ენდოსკოპური ბიპოლარული ფორცეფსები ამონაკლარებში განთავსებული ტექსტური ხელის მიერ აღების ზედაპირებით ამცირებენ ხელის მიერ აღების რთულებას, მათ შორის საქირურგიო ხელთათმანების გამოყენების დროს, რაც თავიდან აიცილებს ინსტრუმენტის გამოსრიალებას პროცედურის კრიტიკულ მომენტებში. წონის ბალანსირებული განაწილება უზრუნველყოფს ინსტრუმენტს ისე, რომ ის ნატურალურად გრძნობილი იყოს ქირურგის ხელში, რაც ამცირებს ხელის ტრემორის მიდრეკილებას, რომელიც შეიძლება მოხდეს ცუდად ბალანსირებული ინსტრუმენტების გამოყენების დროს. კაბელების მართვის სისტემა უფრო მჭიდროდ ინტეგრირდება ხელის დიზაინში, რაც თავიდან აიცილებს კაბელების შეხედვის საშიშროებას, რომელიც შეიძლება შეამციროს საქირურგიო სიზუსტე ან შექმნას სამუშაო სივრცეში საშიშროებას. ხელის შიგნით ჩაშენებული ვიზუალური ინდიკატორები ინსტრუმენტის მდგომარეობისა და ენერგიის აქტივაციის შესახებ მისცემენ დამუშავების მომენტალურ სიგნალს, რაც ამოიცლებს აუცილებლობას ქირურგებს გადაიტანონ ყურადღება საქირურგიო ველიდან მოწყობილობის პარამეტრების შემოწმების მიზნით. მოდულური დიზაინი საშუალებას აძლევს ინსტრუმენტის მარტივად დაშლას და სრულად გასუფთავებას, რაც უზრუნველყოფს ინსტრუმენტის ჰიგიენას და გაზრდის მის სამსახურო ხანგრძლივობას სწორი მოვლის პროტოკოლების გამოყენებით. მისი მტკიცე მშენებლობის მასალები აძლევენ კოროზიის წინააღმდეგ წინააღმდეგობას და შენარჩუნებენ სტრუქტურულ მტკიცებას მრავალჯერადი სტერილიზაციის ციკლების განმავლობაში, რაც უზრუნველყოფს სანდო შედეგებს ინსტრუმენტის მთლიანი სამსახურო ხანგრძლივობის განმავლობაში. ინტუიციური მართვა არ შემოიფარგლება ხელის დიზაინით, არამედ მოიცავს ასევე ხელმისაწვდომად მონიშნულ შეერთების წერტილებს და შეცდომების გარეშე კაბელების შეერთების სისტემას, რაც თავიდან აიცილებს არასწორ დაყენებას და შესაძლო მოწყობილობის ზიანს. სავარჯიშო მოთხოვნილებები მინიმუმამდე ამცირდება მართვის ლოგიკური განლაგების და სხვადასხვა ენდოსკოპური ბიპოლარული ფორცეფსების მოდელების მსგავსი მართვის პრინციპების გამო, რაც საშუალებას აძლევს საქირურგიო გუნდებს სწრაფად ადაპტირდეს ახალ ინსტრუმენტებზე გრძელი სავარჯიშო პერიოდების გარეშე. ეს მომხმარებლის ცენტრში მყოფი დიზაინის მიდგომა საბოლოო ჯამში გამოიხატება საქირურგიო ეფექტურობის გაუმჯობესებაში, პროცედურული სირთულეების შემცირებაში და ქირურგების კმაყოფილების გაზრდაში რთული ლაპაროსკოპური პროცედურების დროს.